JO-ZERO
JOZコントローラ MotionGenerator part3
JO-ZERO
JOZコントローラ MotionGenerator part3> JO-ZERO
JOZコントローラ MotionGenerator part3
・入門編その3 その他のパラメータ解説
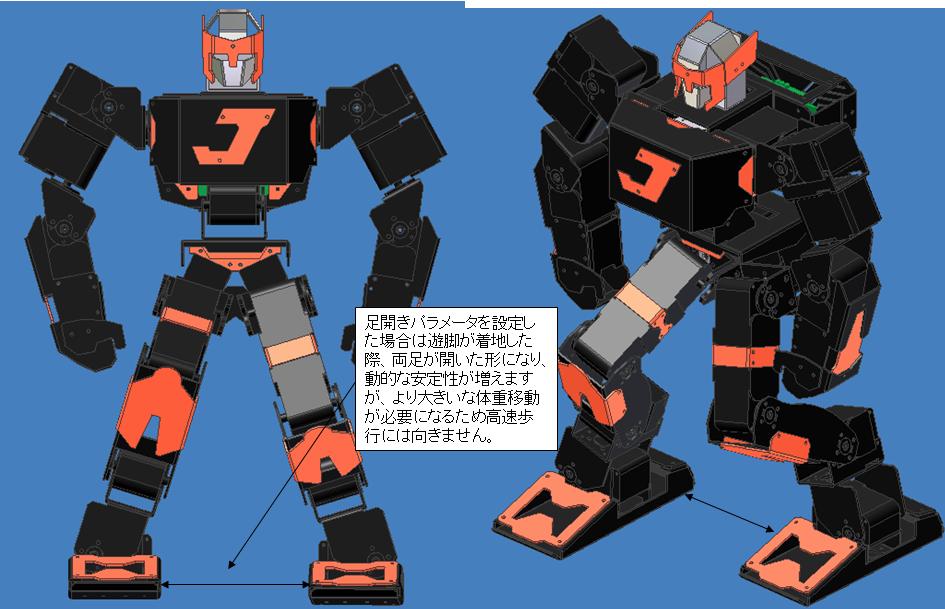
・足開き量(つま先左右)
基本姿勢での左右つま先間の距離を設定します。
本欄に整数値を入力すると両足が左右に開く方向で調整されます。
10を入力すると右足が外側に10mm、左足も外側に10mm、合計20mm開くように設定されます。
この値を大きくすることは遊脚が接地したときの動的な安定性が高まることになります。
また、歩行中に外乱が発生した場合(外部からの接触、不安定な床面など)でも外乱を吸収し、比較的安定して歩行できます。
しかし、本欄が大きくなると体重移動量をその数値に合わせて大きく設定しなければ体重移動ができなくなります。
歩行中、特に外乱が発生しない場合は本欄を小さく設定し、外乱が発生しやすい場合は本欄を大きく設定して調整することでそれぞれの条件に最もマッチした歩行モーションを生成することができます。
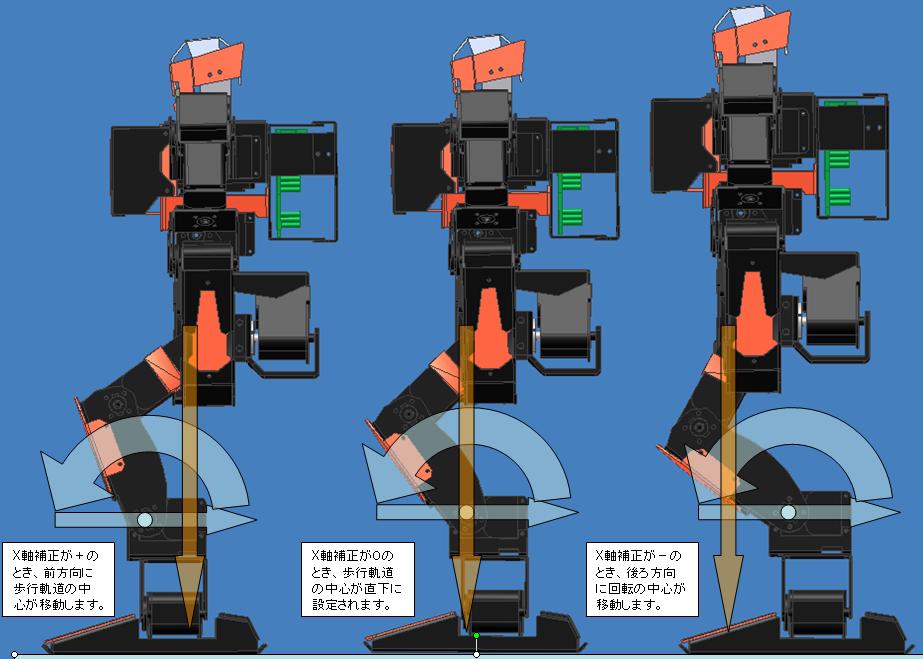
・X軸補正
通常、足首関節の循環軌道は直立時の足首位置を中心に行われますが、この値を修正するとその中心位置をこの値が正であれば前方に、負であれば後方に指定mmだけ移動させる事ができます。
これにより、ロボットのバランスを調整したり、歩行速度による上体の遅れ(慣性力)の受け止めなどに調整が可能になります。
後方に歩く際も本欄に負のパラメータを設定すると転倒しなくなる方向に調整することが可能です。
調整量は大きくありませんので小さな値から順次調整してください。
通常は0のままでよいです。
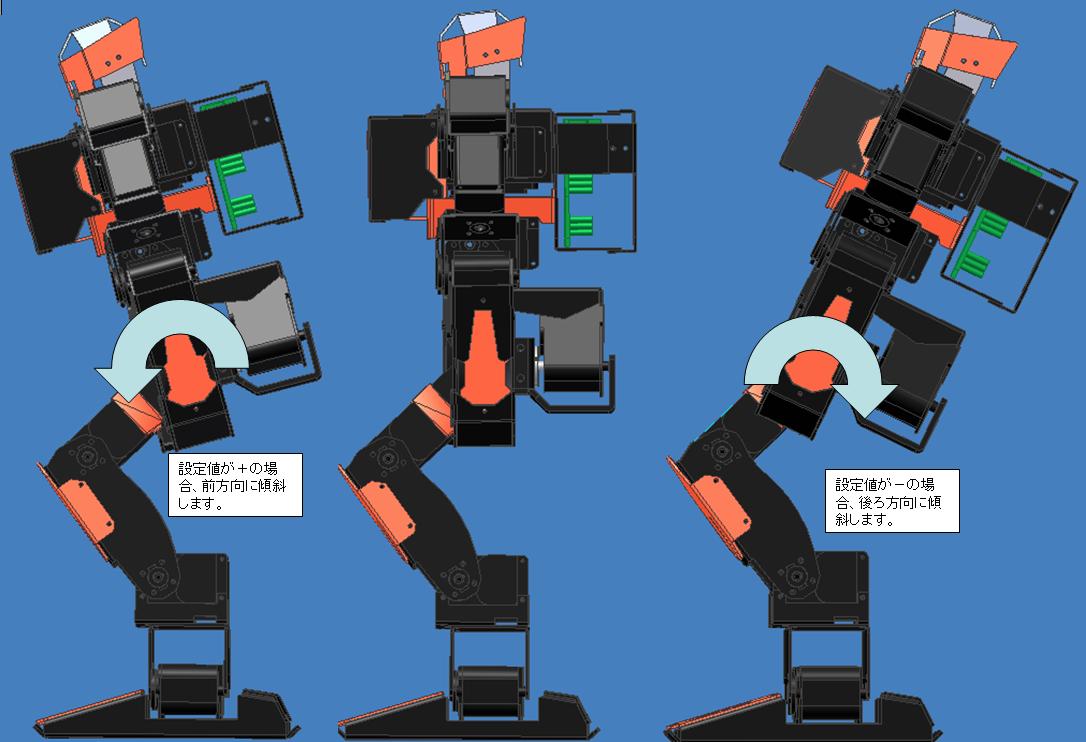
・上半身傾斜
JO-ZERO&STD-ZEROの上半身(ト股関節前後軸)の傾斜を設定します。設定単位は度になります。
n正数でうつむき方向、負数で仰向け方向に調整されます。n初期では5が設定されています。X軸補正機能と組み合わせて、高速歩行(ダッシュ時など)、傾斜歩行の際に調整してください。
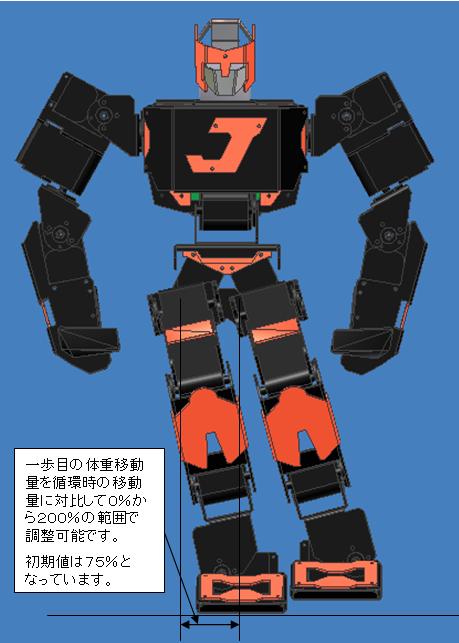
・初期体重移動係数
n停止状態からの1歩目(遊脚引き上げ時)の体重移動量を循環歩行時の体重移動量を基準に0%から200%まで可変できます。n初期値は75%で、ロボットの上半身の質量、支持脚側足裏接地面積などに応じて修正することができます。n連続歩行時はうまくいくが1歩目がうまくいかない場合などに調整してください。o1歩目の動作にて、遊脚側に転倒する場合は数値を大きく、支持脚側に転倒する場合は数値を小さくするようにします。JO-ZERO&STD-ZEROにオプションを追加し、上半身重量が変化した場合や、何らかの改造を行った場合に調整してください。通常は調整不要です。・踏み込み待機時間(チェックボックス&数値欄)
n遊脚を下ろし、両脚ともが接地した時点で一時停止時間を設けることができます。n本欄には0から200までの正の整数を入力することが可能で200にて約1秒の停止となります。n本欄の数値を調整することにより、両脚接地時の安定期間を設けることができ、不安定な床面での歩行を行いやすくすることが可能になります。踏み込み待機時間機能歩行動画(近日掲載)・重心移動左右配分(数値欄&スライダ)
左右配分は通常50で50より数値を大きくすると歩行時の体重移動が右に大きくなり、左側は小さくなります。
50より小さくすると、歩行時の体重移動が左に大きくなり、右側は小さくなります。このパラメータは直立時でも左右の重量バランスが異なるロボットの場合に、調整すると歩行を行いやすくなります。なお、本数値を大きくしすぎると体重移動のための稼動域が上限を超えてしまいやすくなるので、50±30の範囲で調整されることをお勧めします。JO-ZEROでは初期値を60に設定すると歩行動作を行いやすくなります。・重心移動オフセット(数値欄&スライダ)
オフセットは通常15で、0の場合、歩行時の遊脚が着地するとき、重心の左右位置が中心に来るようになっています。本数を大きくすると遊脚接地時点でも支持脚側に重心が残るようになり、非常にゆっくりとした歩行でも安定して歩行することができます。なお、本数値を大きくしすぎると、体重移動の位相がずれすぎて歩行できなくなりますので、0から45程度の間で調整してください。高速歩行を行う際は本数値を小さくすると安定した歩行を行うことができます。極端な高速歩行の場合は本数値を0にするとよいです。・転倒時モーター保護
本項目にチェックを入れると、歩行モーション開始前に両腕両肩関節を転倒より保護するための姿勢をとるプログラムが追記されます。
歩行モーションが終了するとホームポジションに戻す動作が追記されます。
この姿勢の間は両肩の各モータ2個が出力5%程度まで下げられ、転倒時の衝撃を吸収できるようになります。
しかし、この姿勢が万全というわけではなく、転倒状況によってはギヤ破損などが発生する可能性があります。
歩行モーション作成の入門時期には本項目にチェックを入れることをお勧めいたします。
なお、本項目にチェックを入れた場合、腕振り連動機能と腰水平軸回転機能は使用できなくなります。
また、STD-ZEROにても本項目を使用することはできませんので注意が必要です。
転倒時モータ保護機能使用動画(近日掲載)
入門編3 終了 入門編4へ続きます。