> JO-ZERO JOZコントローラ MotionGenerator part2
・入門編その2 その他のパラメータ解説
今回は、前回までの入門編でのパラメータについて調整方法をいくつか説明します。
・左右体重移動量 文字通り、歩行時の体重移動のための移動量です。 この値が、適正値より大きい場合、支持脚側へ転倒します。 逆に、適正値より小さい場合、遊脚側へ転倒します。 また、低速歩行より高速歩行(循環速度が小さくなる)になるほど適正値は小さくなり、極端な高速歩行では適正値は0になります。 ・右足遊脚時左股関節補正と左足遊脚時右股関節補正 この二つのパラメータは遊脚引き上げ時に支持脚側の股関節ロール軸が支えるべき重量に負けて遊脚側が下がってしまう角度分を補償するためのパラメータです。 本パラメータを適正な値に設定するためには何度か実機でテストを行う必要があります。 入門編1でおこなっった足ふみテストで遊脚を引き上げたとき、腰部のフレームが水平を維持できていれば最適な値を設定していることになります。 入門編2 終了 入門編3へ続きます。
・左右体重移動量
文字通り、歩行時の体重移動のための移動量です。 この値が、適正値より大きい場合、支持脚側へ転倒します。 逆に、適正値より小さい場合、遊脚側へ転倒します。 また、低速歩行より高速歩行(循環速度が小さくなる)になるほど適正値は小さくなり、極端な高速歩行では適正値は0になります。
文字通り、歩行時の体重移動のための移動量です。
この値が、適正値より大きい場合、支持脚側へ転倒します。
逆に、適正値より小さい場合、遊脚側へ転倒します。
また、低速歩行より高速歩行(循環速度が小さくなる)になるほど適正値は小さくなり、極端な高速歩行では適正値は0になります。
・右足遊脚時左股関節補正と左足遊脚時右股関節補正
この二つのパラメータは遊脚引き上げ時に支持脚側の股関節ロール軸が支えるべき重量に負けて遊脚側が下がってしまう角度分を補償するためのパラメータです。 本パラメータを適正な値に設定するためには何度か実機でテストを行う必要があります。 入門編1でおこなっった足ふみテストで遊脚を引き上げたとき、腰部のフレームが水平を維持できていれば最適な値を設定していることになります。 入門編2 終了 入門編3へ続きます。
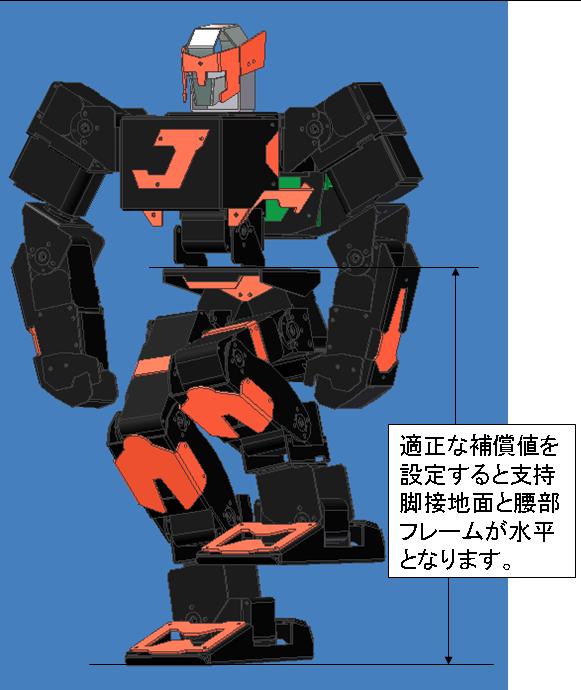
この二つのパラメータは遊脚引き上げ時に支持脚側の股関節ロール軸が支えるべき重量に負けて遊脚側が下がってしまう角度分を補償するためのパラメータです。
本パラメータを適正な値に設定するためには何度か実機でテストを行う必要があります。
入門編1でおこなっった足ふみテストで遊脚を引き上げたとき、腰部のフレームが水平を維持できていれば最適な値を設定していることになります。
入門編2 終了 入門編3へ続きます。